
Um euch auch zwischen Events auf dem Laufenden zu halten, kommt hier ein Zwischenupdate mit den größten Ereignissen seit dem letzten RoboCup. Legen wir also direkt los mit dem …
Elektronik Subteam

Theo mit seinem neuen Oszilloskop
Wenn wir eine Sache in den letzten Jahren gelernt haben, dann dass unser Funk nicht unbedingt der beste ist. Eben deswegen laufen die Diskussionen über ein neues Funkprotokoll auf Hochtouren und selbst ein neuer Funkmaster wird aktuell entwickelt.
Des Weiteren wird an allen Ecken optimiert, um unsere Effizienz in bestimmten Bereichen zu steigern. So verbessern wir aktuell unseren Schussmechanismus und unser Batteriemanagement-System.
Neben einem neuen Oszilloskop (ein elektronisches Messgerät), welches alle Beteiligten sehr, sehr glücklich macht, werden bereits die ersten Schritte zu einer neuen Generation eingeleitet.
Firmware Subteam
Das Firmware-Subteam hat währenddessen eine Menge laufender Projekte. Zum einen möchten wir unsere Roboter-interne Positionsabschätzung verbessern, sodass unsere Bots selbst ohne Hilfe der Kamera an einem Ort stehen bleiben. Aktuell bewegen sich die Roboter ein wenig und laufen so zu sagen von uns weg.
Auch wollen wir unsere Roboter Messdaten-Speicherung verbessern, da diese leider des Öfteren verloren geht. Es gibt nichts Ärgerlicheres, als wenn man einen guten Test durchführen konnte, aber bei der Auswertung nur 60 % der Daten tatsächlich verwendet werden können …
Die wohl wichtigste Neuerung betrifft wohl das Dribbling. Schon länger wollen wir tatsächliches Dribbeln implementieren, und nicht das Robotics eigene „ER-Force Dribbling“, bei dem wir den Ball an der Hülle entlang schieben. Da es sich über die letzten Turniere als starke Schwachstelle herauskristallisiert hat, sind wir sehr vertieft daran, dieses zu verbessern.
Mechanik Subteam
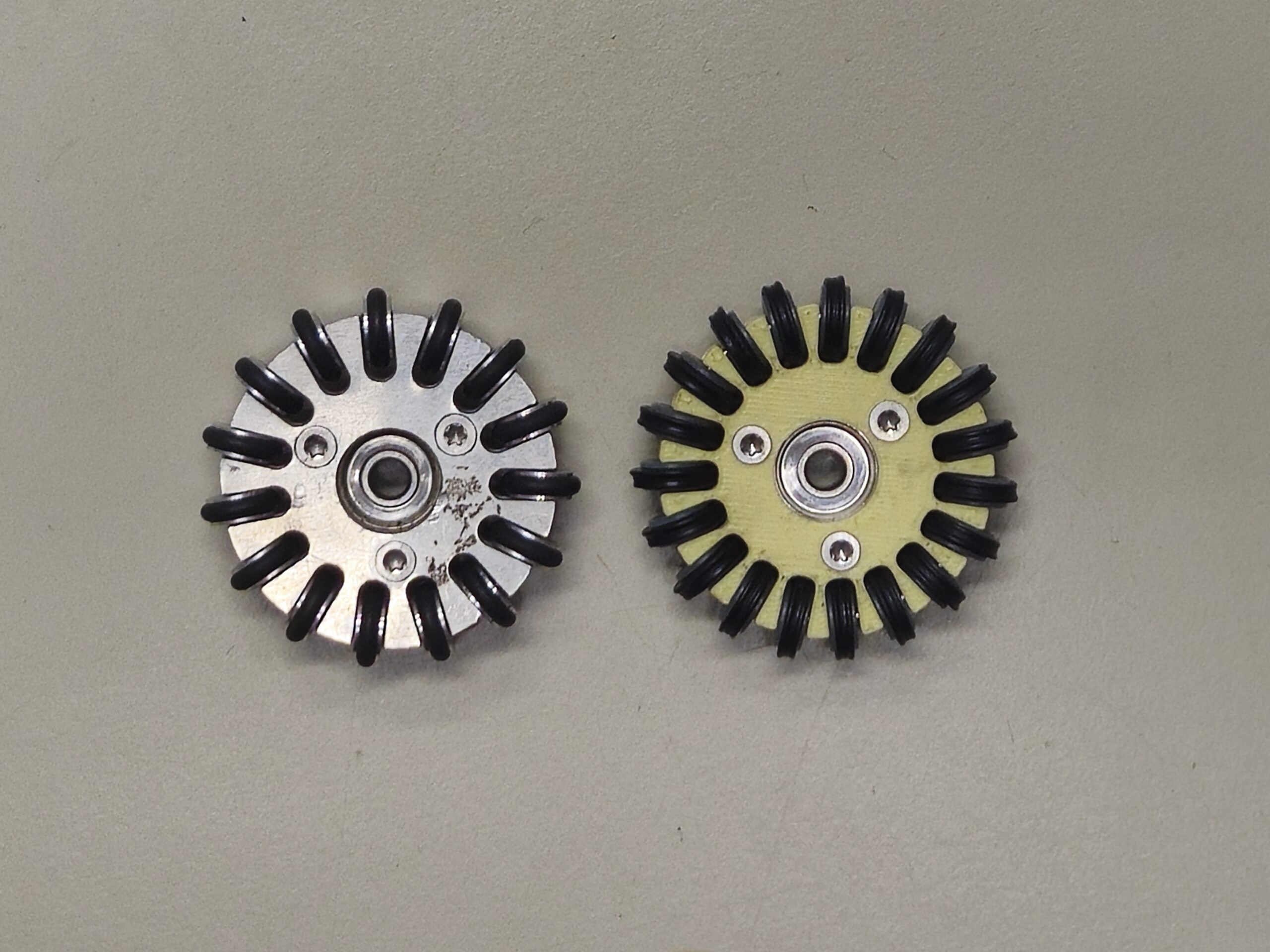
Links die alten mit O-Ringen, rechts die neuen mit X-Ringen
Auch die Mechanik befasste sich mit dem Entwickeln eines neuen Dribblers. Aber nicht nur das, denn auch hier wird die neue Generation und das Roboterdesign geplant. Primär wurde jedoch Vorarbeit für die kommenden Monate gelegt. So haben wir unsere neuen Omniwheels, welche nun mehr Subwheels haben, mit einer neuen Art von Ringen bezogen. Dadurch können die Roboter flüssiger fahren. Außerdem wurden aufgrund von mehreren Schäden im Keller dieser mehrfach aus-, ein- und aufgeräumt.
Die wohl lustigste Neuerung sind unsere neuen Roboterständer, da wir unsere alten, welche aus Holz sind, nicht Übersee mitnehmen dürfen.
Software Subteam
Im Zuge der neuen Vision „Dribbeln“ müssen natürlich auch die Pfade, welche die Roboter letzten Endes abfahren, in der Strategie geplant werden. Um dies zu ermöglichen, wurde hier eine Schnittstelle zwischen dem Berechnungsmodul und dem Robotermodul entwickelt. Des Weiteren versuchen wir „Machine Learning“ in unsere Strategie einfließen zu lassen, indem beispielsweise Parameter automatisch optimiert werden oder zukünftige Szenarien für uns optimal ausgewertet und eingeleitet werden.
Wer schon mal den TIGERs beim Spielen zugesehen hat weiß, dass Sie den ein oder anderen Victory-Move haben. Um diesen zu trotzen, haben auch wir mit den Siegestänzen angezogen.

Neben all dem laufen zudem noch die ersten Vorbereitungen für den kommenden RoboCup 2025 sowie Schubert Cup 2025. Zudem fand bei uns bereits ein Ersti-Workshop sowie die Jahreshauptversammlung statt, auf welcher Christoph Schmidtmeier sowie Arthur Sahm als unser neuer Vorstand gewählt wurde.
Zuletzt wünschen wir euch allen frohe Festtage und einen guten Rutsch ins neue Jahr!