
Please note: While we try to always keep the English blog up-to date, there might be some delay regarding when a German blog post gets translated. Also, articles prior to RoboCup 2022 do not have English translations. To see those articles in German, please switch to the German blog.
Robotics Erlangen Trailer
Featured
Team-Sync since RoboCup 2024
To keep you up to date between events, here’s a mid-update with the biggest happenings since the last RoboCup. Let’s jump right in with the …
Electronics Subteam

Theo with his new oscilloscope
If there’s one thing we’ve learned in recent years, it’s that our radio communication isn’t exactly the best. That’s why discussions about a new radio protocol are in full swing, and a new radio master is also being developed.
Furthermore, optimizations are being made everywhere to improve our efficiency in specific areas. Currently, we are improving our shooting mechanism and our battery management system.
In addition to a new oscilloscope (an electronic measuring device), which makes everyone involved very, very happy, the first steps toward a new generation are already underway.
Firmware Subteam
Meanwhile, the Firmware Subteam has a lot of ongoing projects. One goal is to improve our robots’ internal position estimation so that they can stay in one spot without the camera’s assistance. Currently, the robots move slightly and, so to speak, walk away from us.
We also want to improve how our robots store measurement data, as this data is unfortunately often lost. There’s nothing more frustrating than conducting a good test but only being able to use 60% of the data during evaluation.
The most significant innovation likely concerns dribbling. We’ve long wanted to implement actual dribbling rather than our “ER-Force dribbling,” where we push the ball along the housing. Since this has emerged as a major weakness during recent tournaments, we’re deeply focused on improving it.
Mechanics Subteam
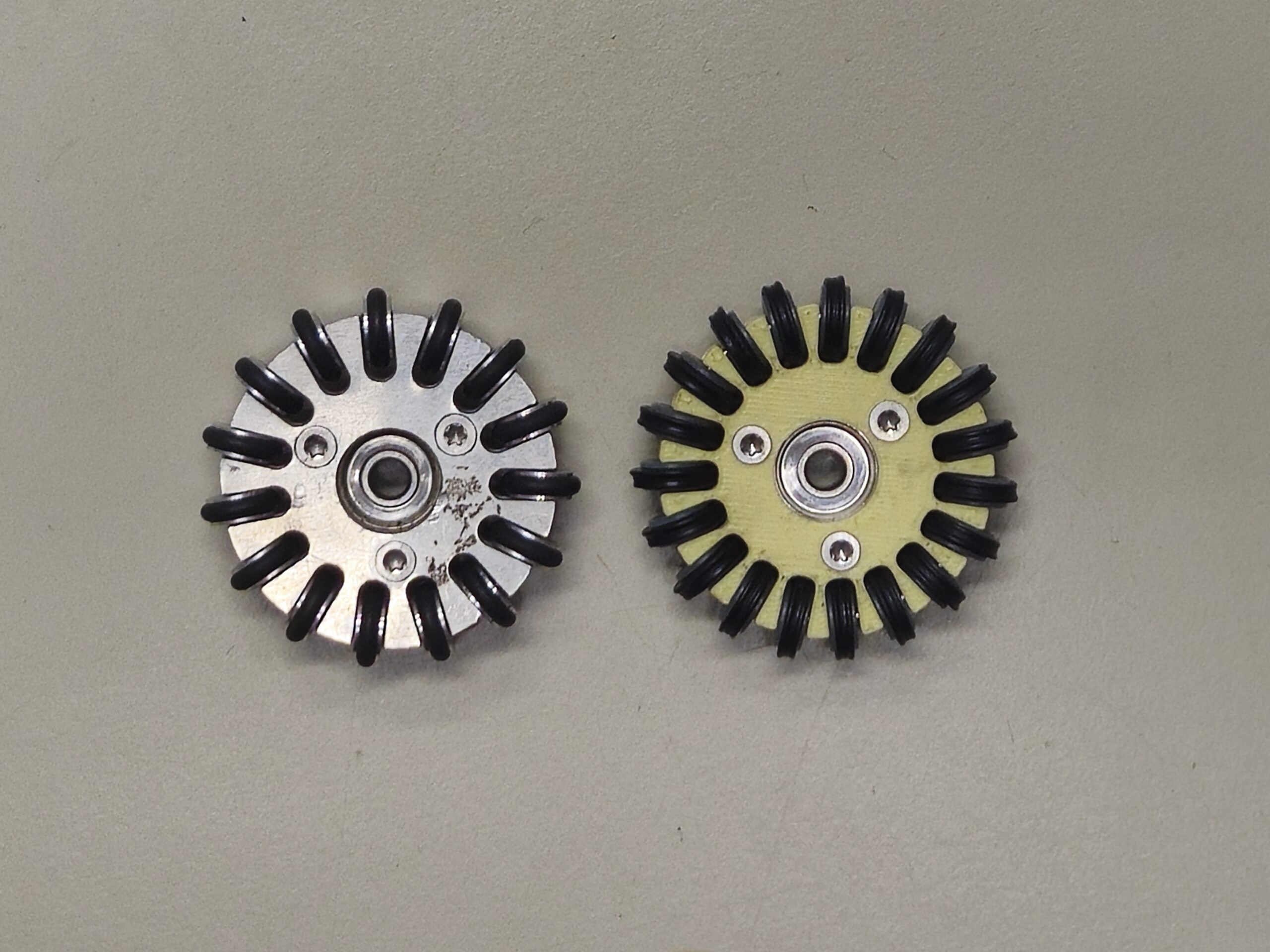
On the left, the old wheels with O-rings; on the right, the new ones with X-rings
The Mechanics Subteam also worked on developing a new dribbler. But that’s not all, as the new generation and robot design are being planned here as well. However, the primary focus was laying the groundwork for the coming months. For example, we’ve equipped our new Omniwheels, which now have more Subwheels, with a new type of rings. This allows the robots to drive more smoothly.
Additionally, due to several damages in the basement, it has been cleared out, reorganized, and cleaned multiple times.
The funniest innovation is probably our new robot stands, as we are not allowed to take our old wooden ones overseas.
Software Subteam
As part of the new “dribbling” vision, the paths that the robots ultimately follow in strategy must be planned. To enable this, an interface between the calculation module and the robot module has been developed.
Additionally, we’re trying to incorporate machine learning into our strategy. For example, parameters are optimized automatically, or future scenarios are evaluated and executed optimally for us.
Anyone who has watched the TIGERs play knows that they have some victory moves. To counter this, we’ve also started working on victory dances of our own.

In addition to all this, the first preparations for the upcoming RoboCup 2025 and Schubert Cup 2025 are already underway. We’ve also already held a freshman workshop and the annual general meeting, where Christoph Schmidtmeier and Arthur Sahm were elected as our new board.
Finally, we wish you all happy holidays and a great start to the new year!
University Group Meeting & Open Lab Day
As every year, we will also participate in the University Group Meeting on Wednesday, October 16, 2024, at the Red Square of the Faculty of Engineering. We’ll have an information booth there all day, where we’ll share insights about Robotics and the RoboCup with anyone interested. Additionally, we’ll set up a small field where you can drive the robots manually.
We are also hosting our Open Lab Day on October 30, 2024. This will likely take place in the basement of the Blue Skyscraper at TechFak, where we’ll demonstrate our robots live in a test match against ourselves. You can learn more about this at the University Group Meeting or in an upcoming post.
Feel free to drop by at both events. We look forward to seeing you there!
RoboCup 2024: Review
 Tournament
Tournament

In our Division A of the Small Size League of RoboCup this year, nine teams from five countries competed against each other. A special feature was the two newcomers RobôCIn and luhbots, who this year made the step from Division B to a larger field and more robots in Division A. After three setup days, the teams first competed in a 4-team and 5-team group during the two group match days. The top three teams from each group then advanced to the knockout phase over the next two match days. By securing second place in our group, we were able to secure a good starting position here. In the double elimination mode, the respective group winners and runners-up could each lose once without being eliminated from the tournament. Thanks to our good performances on the field, we managed to secure a solid third place for our team despite many games in the lower bracket. Second place went to the Chinese team ZJUNlict and the current and past world champion is TIGERs Mannheim. A special mention should definitely go to the two new teams who managed to play exciting and balanced games against long-standing Division A teams almost right from the start. Particularly, the fourth place of RobôCIn is an extremely strong performance. At this point, we would also like to expressly thank luhbots, Immortals, RoboTeam Twente, RobôCIn, and TIGERs Mannheim for their help and extraordinary commitment to the league. This is by no means a matter of course.
Our Team in the Tournament
 For us, the RoboCup started off quite bumpy again, and the first fears arose that we might experience a similar disaster to 2023 in Bordeaux. Fortunately, this was not the case. Instead, we managed to solve individual problems step by step. During the setup days and our first game, we still struggled considerably with our radio system and the control of the robots. But by the second game, we were already capable of fielding 11 robots. Nonetheless, we refrained from doing so in the group phase and fielded 8 robots each time. This was mainly because we were still plagued by overheating issues, and substitute robots were therefore extremely valuable.
For us, the RoboCup started off quite bumpy again, and the first fears arose that we might experience a similar disaster to 2023 in Bordeaux. Fortunately, this was not the case. Instead, we managed to solve individual problems step by step. During the setup days and our first game, we still struggled considerably with our radio system and the control of the robots. But by the second game, we were already capable of fielding 11 robots. Nonetheless, we refrained from doing so in the group phase and fielded 8 robots each time. This was mainly because we were still plagued by overheating issues, and substitute robots were therefore extremely valuable.

For the knockout stage, we took a bold step and removed unnecessary parts from the module connector PCB and equipped our motor boards with heat sinks. Together with a relentless hunt for individual faulty robot components, we were able to increase the reliability of our fleet so that we could permanently field 11 robots in the knockout phase. This is a strong performance by the entire team, and we are excited about what the future holds with the now fully functional robots. Thus, we can conclude this RoboCup, tired from the strenuous days, but satisfied with our progress and success.
Betting Game
A novelty this year was the betting game we organized for RoboCup 2024. Just like in conventional football, bets could be placed on individual games, the outcome of the group phase, and the overall tournament. The most points were collected by our team members Michi and Mike, who stayed at home. Due to the great support from other teams, we plan to set up an official betting game for RoboCup next year.
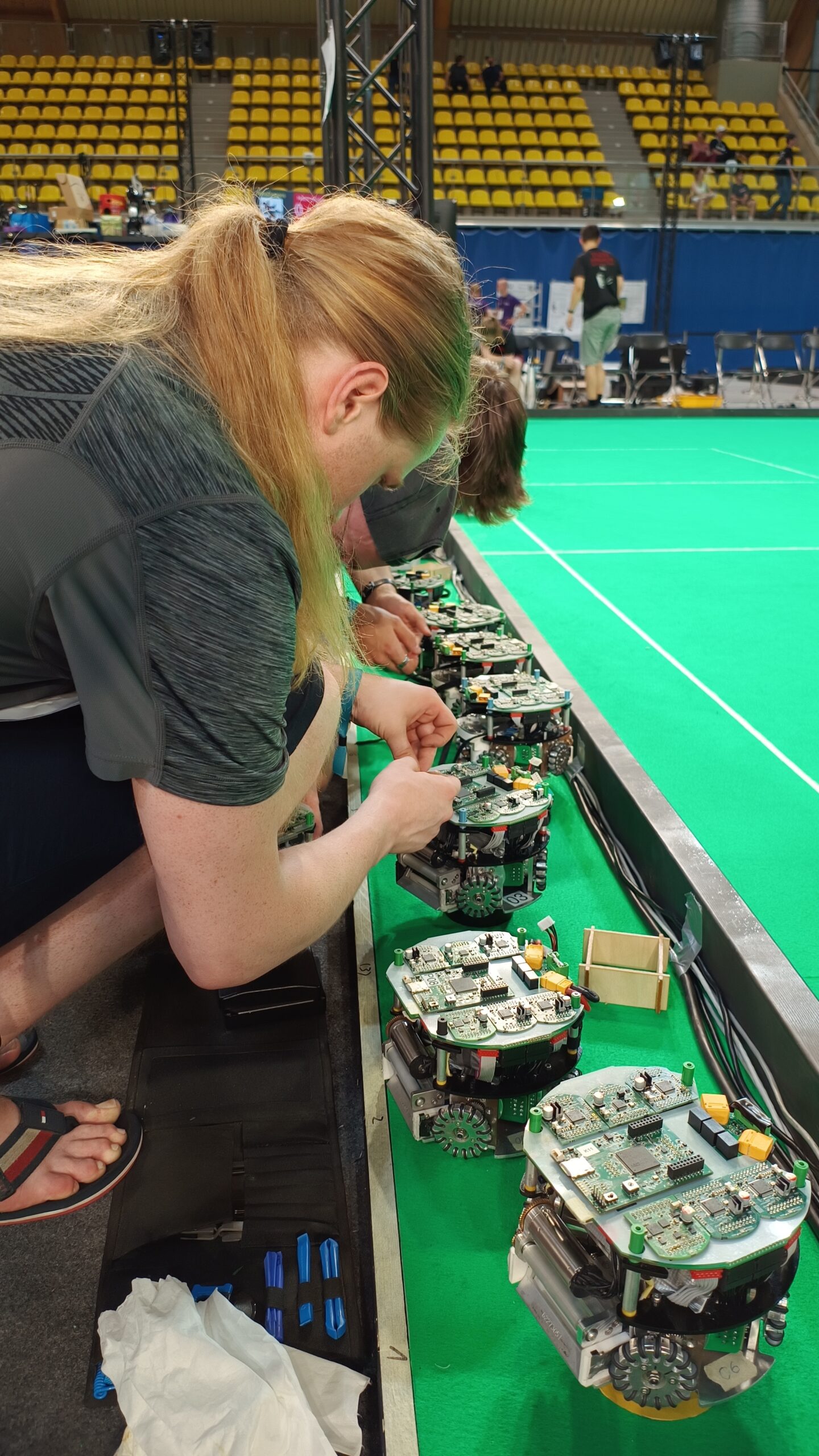
Impressions






RoboCup 2025
Now that RoboCup 2024 in Eindhoven has ended and all teams have departed, we look to the future. We look forward to an interesting year with many improvements and innovations in our strategy and robots, as well as visits from other teams. But of course, our main focus is on the next RoboCup 2025. It will take place from July 15 to July 21, 2025, in the Brazilian coastal city of Salvador. The first images of the location already make us excited for sun, warmth, and of course a RoboCup hall right next to one of Brazil’s beautiful beaches.
See you in Salvador!
RoboCup 2024: Knock-Out Games
Robot Testing
The new radio system and our robots’ control have finally been running stably since the last games. This is now the ideal starting point to increase the availability of other subsystems of our robot fleet. Between games, we use the time intensively to fix individual robots and validate changes in our strategy. By solving our overheating issues, we are now able to reliably maintain a fleet of 12 to 13 robots throughout an entire game. This means there are always robots available to substitute.

Wired Testing
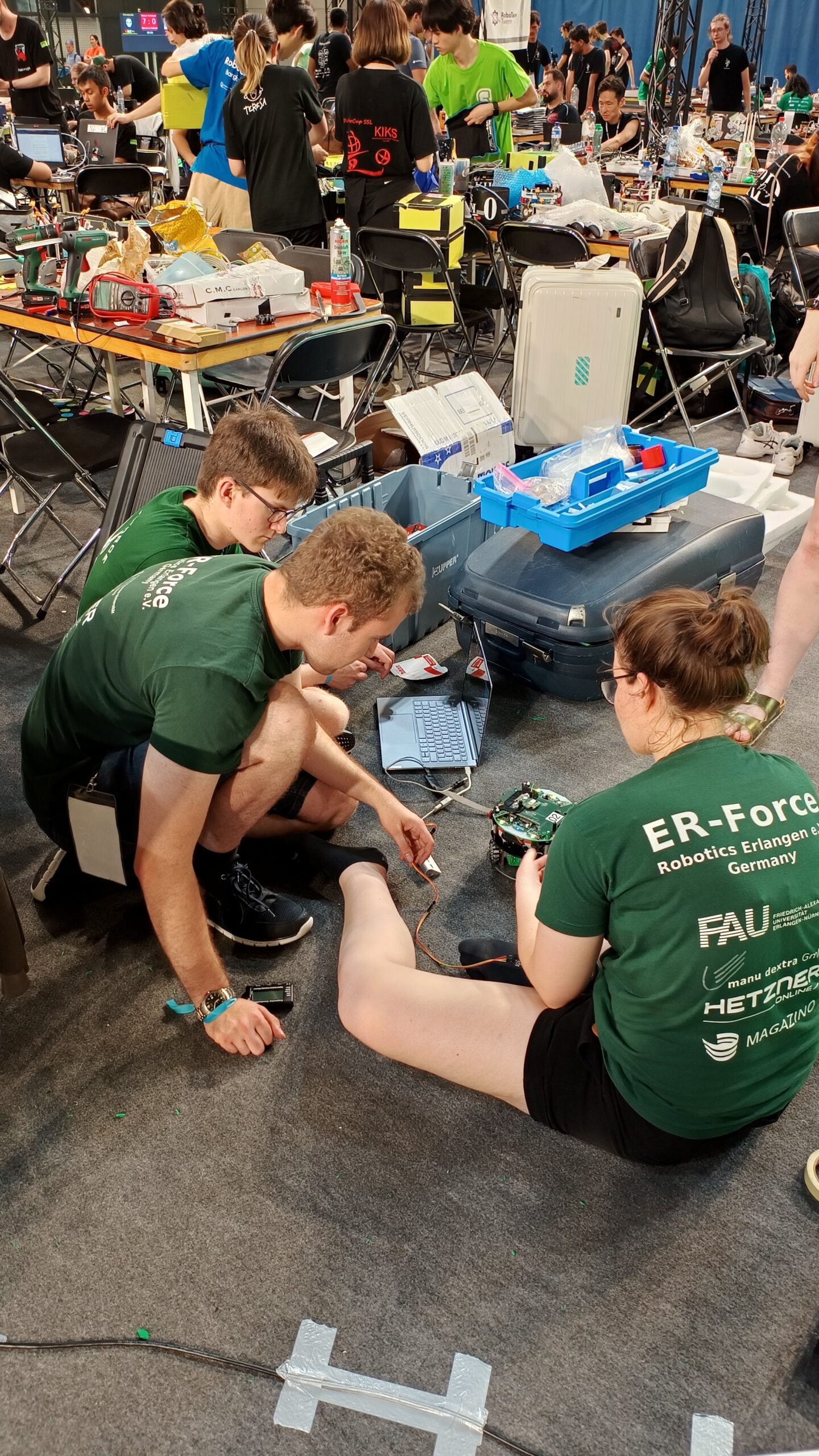
An important building block for our increased fleet availability in games is a new way to test robots without using the radio system. Our firmware programmer Maxi has implemented a serial protocol to enable wired control of the robots. This allows us to test robots after repairs during games, reducing the risk of deploying defective robots.
Games
Right on time for the Knockout Stage, we had enough robots and a stable control setup to participate in games with 11 robots. Often, all 13 robots we brought along were ready for action, with enough substitute bots available for minor defects. Nevertheless, we could not overcome the superiority of TIGERs Mannheim and lost the first game in the Knockout Stage. A unique aspect of our tournament format is that the first loss does not mean immediate elimination; instead, we continue in the Lower Bracket until another loss there. We won our next game against RoboDragons, allowing us to proceed in the Lower Bracket. We also managed to defeat RobôCIn. With this victory, we secured our place in the Lower Final on Sunday. In this game against ZJUNlict, we unfortunately lost 0-1 after a strong performance. With this, we conclude RoboCup 2024 in 3rd place in Division A of the Small Size League.
RoboCup 2024: Lower Final: ZJUNlict vs. ER-Force
After our victory against RobôCIn last night, we play today in the Lower Final against ZJUNlict from China. This team has already met us once in the group stage, where we lost 0:1. So we expect an exciting match today as well. This time, however, we are playing 11 vs. 11 robots and not 8 vs. 8 like in the group stage. The game starts at 10:30 AM after the Lower Final of Division B.
The final day in Division A of the SSL is streamed again by Roboteam Twente. The numerous other finals of the other leagues can be watched on the RoboCup Live Channel.
First Half:
5:00 Smooth play in the first minute. ZJUNlict’s dominance is evident again, but so far our robots are very good at fending off all attacks.
4:00 We fumble a ball placement, but ZJUNlict sometimes fails at it too. Therefore, both teams are alternating kick-offs in our half of the field. So far, both teams are driving very carefully and there are few fouls. However, with rising temperatures and decreasing controller quality, this tends to get a bit worse for our robots. ZJUNlict is already taking their second timeout and has used up a lot of their timeout time.
3:00 Apparently, they are not yet satisfied with their strategy. Dangerous situation for us, but our robot does not shoot because there is no gap. That could have almost been the first goal. Shot from ZJUNlict, but our goalkeeper makes a perfect save.
2:00 We have accumulated 3 fouls and have to take out a robot. Corners are alternating in our half again. Despite their extremely strong dribbler, ZJUNlict has not been able to dominate us in duels so far. ZJUNlict challenges a corner that was awarded to us. Rightly so, as we were actually last to touch the ball.
1:00 No progress in our ball placement. Thus, we give the corner in our half to ZJUNlict. That is potentially dangerous. Fortunately, ZJUNlict’s robot fumbles the kick-off and we get another chance. So far, a balanced game. Timeout for ZJUNlict. Apparently, their strategy is causing problems again. ZJUNlict’s robots are moving again and the game continues. Tumult in front of our goal. Pass combination from ZJUNlict and a shot into our goal. But apparently, the shot was too fast. The score remains 0:0. Only 10 seconds left in the first half. But we give the corner to ZJUNlict. The field in front of our goal is damaged, but the referee decides to repair it at halftime.
Halftime
Both teams are working on the robots. We need to cool down our robots again and ZJUNlict is changing their batteries. The referees are trying to fix the field with some staples in the carpet, but the carpet has already suffered a lot from the numerous games.
Second Half
We take a short timeout as one of our radio modules seems to be having problems.
5:00 Kickoff for us. But our robot doesn’t shoot properly. Apparently, one of our robots is still having problems. We seem unable to perform ball placement from the goal. This has already happened twice in this game. ZJUNlict gets a yellow card for too many collisions. Apparently, one robot is not visible because it is stuck in a shadow. While solving the vision problems, our robots are slowly turning on the field as they have a position control implemented that still has a slight drift. TC/OC is brought to the vision computer, maybe it will continue soon. The referees are trying to remove the shadows from the field by shifting the screens for the game state. The game continues. Strong duel in the midfield, but we manage to prevent the ball from being shot at our goal.
4:00 We fail at ball placement. Thus, kick-off for ZJUNlict. Our robots are very confused by ZJUNlict’s strong dribbling. But it is also outstandingly good. Maybe we will achieve that in the coming years as well. Many passes in our half.
3:00 Two robots collide, resulting in yellow cards for both teams and both teams’ robots substitute themselves.
2:00 Neither team can make real progress and it is a constant back and forth duel. Unfortunately, we still lack a bit of precision, especially in handling the ball, and we often miss dangerous chances. Good pass combination from ZJUNlict. Shot at our goal and … converted. ZJUNlict takes the lead 1:0.
1:00 We take a short timeout. Apparently, we have significantly adjusted our strategy to be more aggressive. Our robots are now much stronger in the midfield and on ZJUNlict’s side. Unfortunately, we still lack precision in these last situations and we do not convert the shots. One last corner from ZJUNlict. But there was a referee’s error and the corner should have gone to us. In this faulty play, you can still see a brilliant save from our goalkeeper. He would have saved everything anyway.
We lose this game 0:1. Thus, we are out of the tournament. Nevertheless, we are happy about our third place, which would have been completely unthinkable with the quality of our play and robots two months ago.
The final ZJUNlict vs. TIGERs Mannheim takes place at 1:00 PM. Before that, there is the Division B final immediately following.