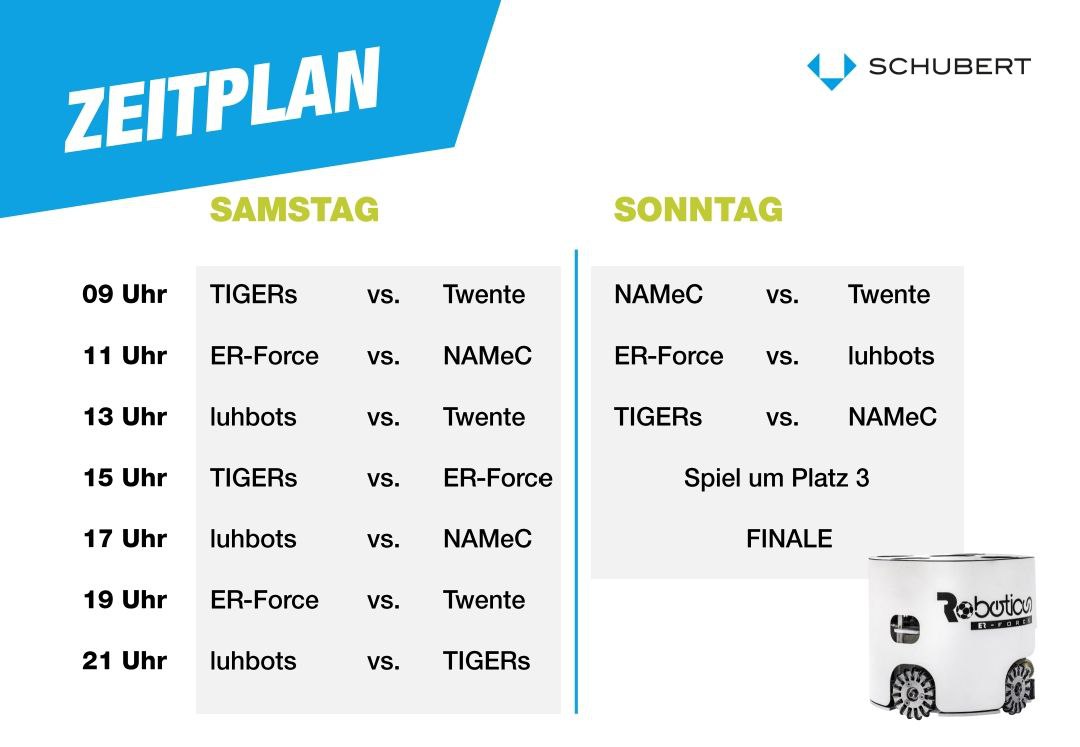
Our weekend was originally supposed to start with a game against the French team NAMeC, but it seems that the majority of their members have been caught in a strike when they travelled from Bordeaux, which is why only very few members and robots are currently present. Therefore, after consultation with luhbots, we offered to swap the game ER-Force vs. NAMeC with the game ER-Force vs. luhbots that was originally planned for Sunday.

Hence, we are now playing our first game against the Hanoverian team luhbots. Despite the switch, the game will still be played on only one half of the field, as both luhbots and NAMeC are Division B teams.
In contrast to Division A, in which our team plays, Division B is an entry-level league for new teams. Accordingly, the playing field is smaller and only 6 robots per team play a game.
In addition, both teams agree to play without ball placement, i.e. the ball is not automatically placed by robots if it goes out of bounds, but instead by the human referee. This rule is mandatory for games between Division A teams, but can be waived in the case of Division B games.
After the live commentary by ER-Force is ready, we can finally start!

Something new happens shortly after the kick-off: with little sensitivity, the luhbots’ robots severely damaged a ball through excessive dribbling, so that it had to be pulled out of circulation. At least their dribbler seems strong enough. Luckily we have enough spare balls with us so that after a lot of laughter we can continue straight away.
Our new prototype was able to play for the first time (see video, number 15). It even scored a goal right away, but the ball was too fast and the goal wasn’t counted.
Nevertheless, we were able to win the game 4:0. Overall, the game was relatively smooth and enjoyable to watch. For such a new team, the game was a really good effort.
Unfortunately, we are currently well behind schedule due to technical problems. According to the current status, the next game RoboTeam Twente vs. luhbots will take place at 3:00 p.m.