To keep you up to date between events, here’s a mid-update with the biggest happenings since the last RoboCup. Let’s jump right in with the …
Electronics Subteam

Theo with his new oscilloscope
If there’s one thing we’ve learned in recent years, it’s that our radio communication isn’t exactly the best. That’s why discussions about a new radio protocol are in full swing, and a new radio master is also being developed.
Furthermore, optimizations are being made everywhere to improve our efficiency in specific areas. Currently, we are improving our shooting mechanism and our battery management system.
In addition to a new oscilloscope (an electronic measuring device), which makes everyone involved very, very happy, the first steps toward a new generation are already underway.
Firmware Subteam
Meanwhile, the Firmware Subteam has a lot of ongoing projects. One goal is to improve our robots’ internal position estimation so that they can stay in one spot without the camera’s assistance. Currently, the robots move slightly and, so to speak, walk away from us.
We also want to improve how our robots store measurement data, as this data is unfortunately often lost. There’s nothing more frustrating than conducting a good test but only being able to use 60% of the data during evaluation.
The most significant innovation likely concerns dribbling. We’ve long wanted to implement actual dribbling rather than our “ER-Force dribbling,” where we push the ball along the housing. Since this has emerged as a major weakness during recent tournaments, we’re deeply focused on improving it.
Mechanics Subteam
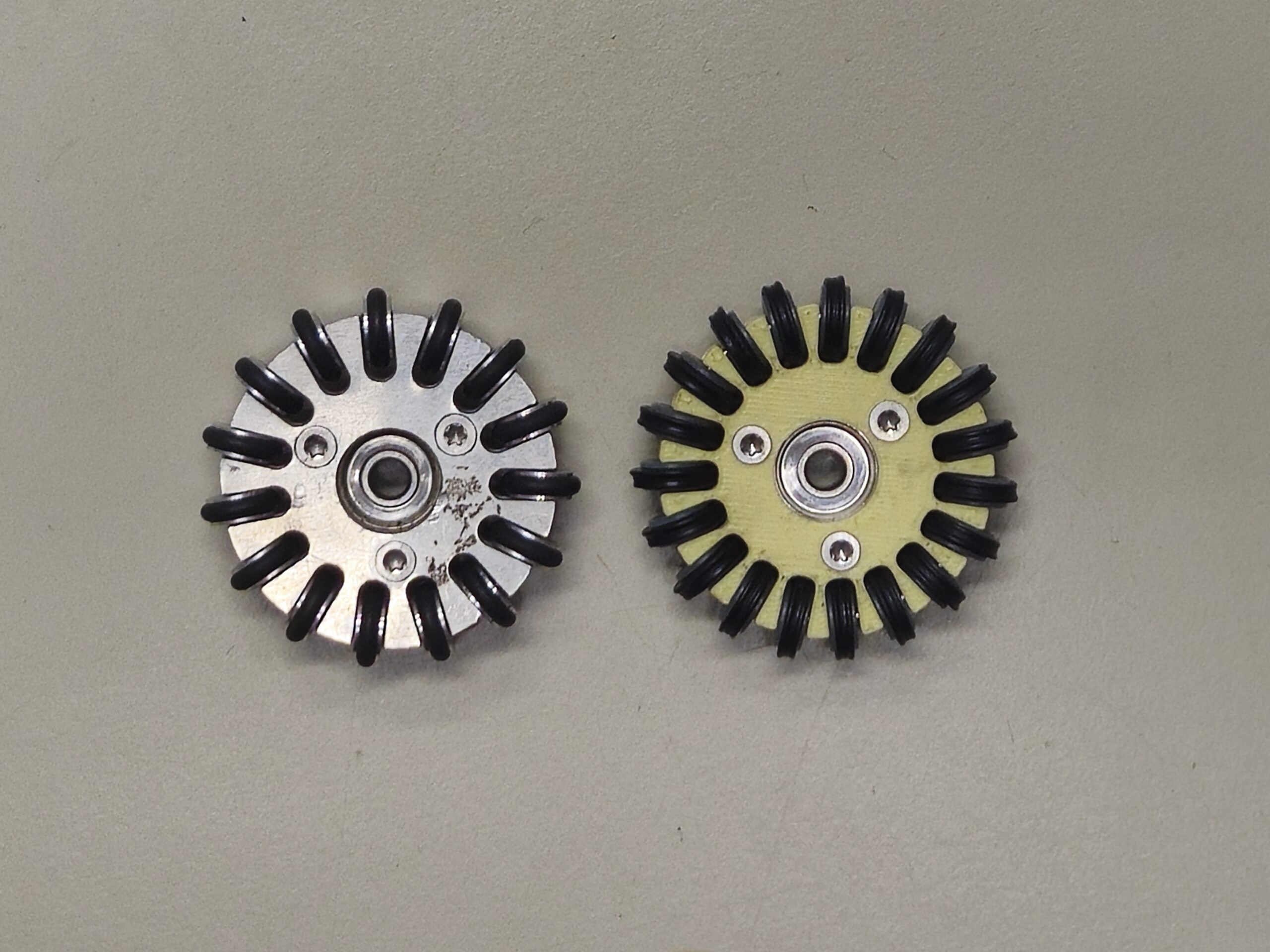
On the left, the old wheels with O-rings; on the right, the new ones with X-rings
The Mechanics Subteam also worked on developing a new dribbler. But that’s not all, as the new generation and robot design are being planned here as well. However, the primary focus was laying the groundwork for the coming months. For example, we’ve equipped our new Omniwheels, which now have more Subwheels, with a new type of rings. This allows the robots to drive more smoothly.
Additionally, due to several damages in the basement, it has been cleared out, reorganized, and cleaned multiple times.
The funniest innovation is probably our new robot stands, as we are not allowed to take our old wooden ones overseas.
Software Subteam
As part of the new “dribbling” vision, the paths that the robots ultimately follow in strategy must be planned. To enable this, an interface between the calculation module and the robot module has been developed.
Additionally, we’re trying to incorporate machine learning into our strategy. For example, parameters are optimized automatically, or future scenarios are evaluated and executed optimally for us.
Anyone who has watched the TIGERs play knows that they have some victory moves. To counter this, we’ve also started working on victory dances of our own.

In addition to all this, the first preparations for the upcoming RoboCup 2025 and Schubert Cup 2025 are already underway. We’ve also already held a freshman workshop and the annual general meeting, where Christoph Schmidtmeier and Arthur Sahm were elected as our new board.
Finally, we wish you all happy holidays and a great start to the new year!