
Today is the second day of the group stage. We will be playing a total of three matches.
At 9:00 AM against KIKS.
At 12:00 PM against LUHBots.
At 7:30 PM against ZJU.
The matches can again be watched live on the stream by Robo Team Twente.
Today is the second day of the group stage. We will be playing a total of three matches.
At 9:00 AM against KIKS.
At 12:00 PM against LUHBots.
At 7:30 PM against ZJU.
The matches can again be watched live on the stream by Robo Team Twente.
After the arrival and setup days over the past few days, today marks the start of the actual tournament of our league at RoboCup. Initially, there are two group stage days followed by the knockout round.
 Technical Challenge
Technical ChallengeOur day began with the Team vs. Team Pass Challenge. As with the technical challenges of recent years, four of our robots must pass the ball to each other as accurately as possible. The new twist this year is that another team attempts the same challenge simultaneously with the same ball. The teams, therefore, take the ball away from each other and must pass in such a way that the balls stay out of the opponent’s reach.
With today, RoboCup officially opens its doors to spectators. With the spectators and the first group stage games, we are increasingly experiencing the typical RoboCup feeling, characterized by a cool community with a touch of competition. Many media representatives were also present in the hall today. Our mechanics team, for example, gave a short interview for Omroepbrabant.

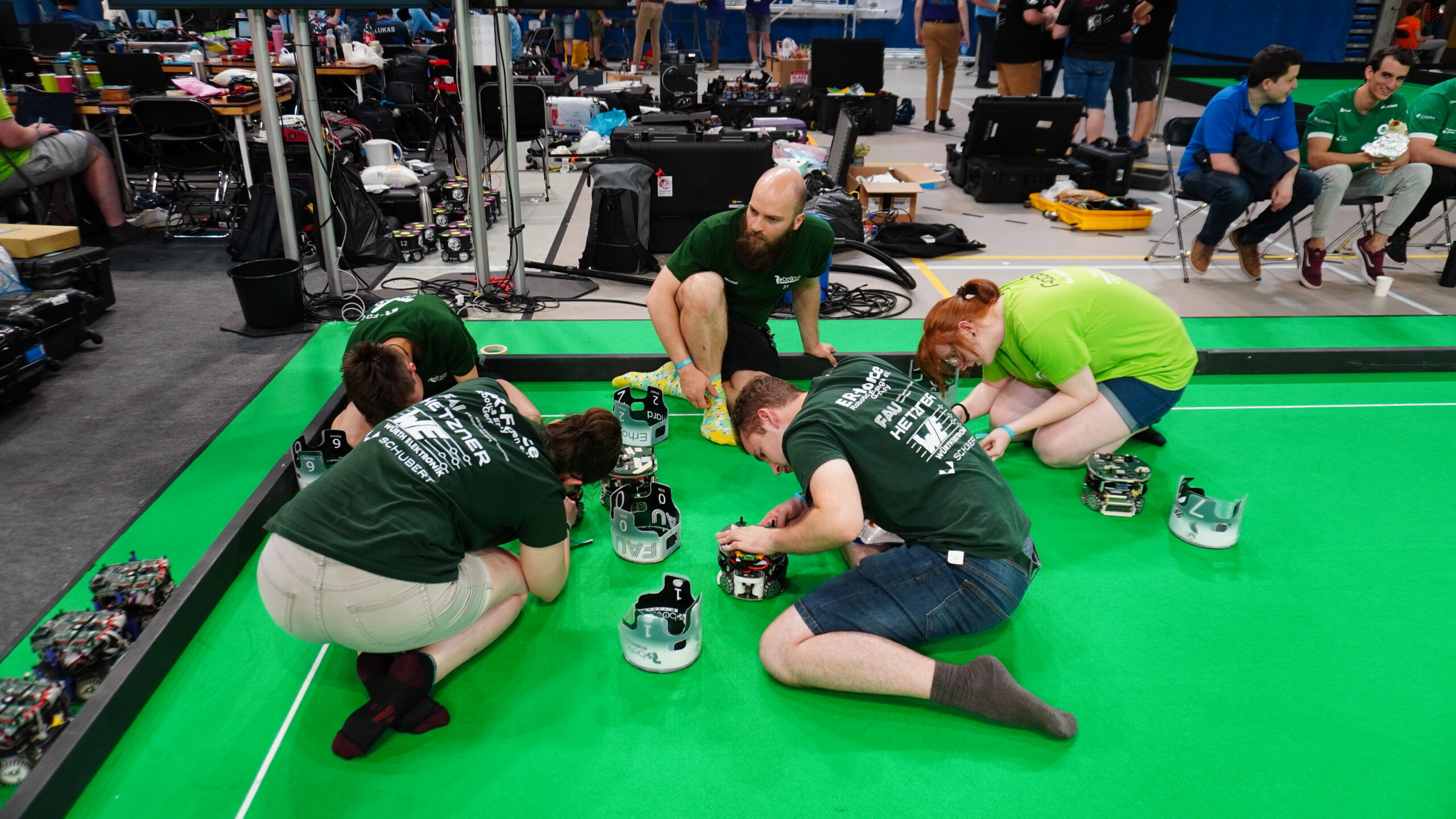
The highlight of today’s day was undoubtedly our first group match against RobôCIn. There is also a detailed blog about it. A new FOC regulation of our motors was used for the first time in a game. During the halftime break, we had to repair and realign the shells of some robots, as they had taken some damage from collisions during the game.
 Official Roles
Official RolesIn addition to our own games, we also have to take on official roles for other matches. Members of our team serve as referees, game controller operators, or vision experts, ensuring a smooth game.
Now it’s our turn, and we are about to start our first official match of this RoboCup in just a few minutes. Our first group match starts at 3:00 PM against the Brazilian team RoboCin.
This match can be watched live on RoboTeam Twente’s livestream.
Before the match, final repairs are being made to the field, as the field lines are already starting to come off after just a few games.
05:00 – Kick-off, the match begins. ER-Force is playing with white shells and yellow color.
4:30 – Good passing and a tough fight, and the ball is out. One of our robots seems to have temporary radio issues, and we take this robot out of the game. We are playing 7 vs. 8. Ball placement for RoboCin and intense play near our goal. Challenge flag from RoboCin. The game is stuck in a stalemate, and the game controller operator seems unsure of how to proceed.
4:00 – Intense play with big passes across the field. Ball placement for us. Finally, after a year of many failed attempts, we manage the ball placement again. The ball is in our half again, and our robots immediately manage to play it back to the opponent.
3:30 – Both we and RoboCin receive yellow cards for some light crashes.
3:00 – Problems with the game controller. There is another game controller on the network again. Our strategy and the audio ref are immediately causing problems. Fixing the problem will probably take a few minutes. The game resumes. The RoboCin robot can’t dribble but still manages the ball placement. Our robots are successful in defense and repeatedly fend off the opponents.
2:30 – Intense battle from our robots in front of our penalty area. Corner successfully defended.
2:00 – Very dangerous situations in front of our penalty area. Our defense let the ball through but no goal. Ball placement for RoboCin in their half.
1:30 – Long shot across the field and the ball is out again and needs to be placed by us. Nice chip kick but unfortunately, our robot couldn’t receive it.
1:00 – Parts are found on the field. Luckily they are not from us. Ball placement by RoboCin. Poor defense from us. Unfortunately, we are dueling very poorly, creating dangerous situations again and again.
0:30 – We challenge a potential excessive dribbling, which we believe was actually pushing by an opposing robot.
Half-time: The score remains 0:0 in this intense and exciting game.
5:00 – Kick-off for blue, double touch, and we have the kick-off. Foul by RoboCin. Very close situation in front of the RoboCin goal, but not converted.
4:30 – Ball placement for RoboCin. As always, with very little dribbling. Strong defense by our number 6. One of our robots had no radio, but it recovered just in time for ball placement.
4:00 – Successful defense by our robots. Unfortunately, a lot of dribbling is happening in front of our penalty area.
3:00 – Timeout for us. We need to restart one of our robots as it apparently went off during a collision. The referee is confused, asking us if we are ready to continue during our timeout. The game resumes.
2:30 – Intense battle in front of our penalty area. Ball placement for us in the opponent’s half. Success.
2:00 – Again, intense power play in our penalty area. Potential goal for us, but before that, the ball was shot too fast by RoboCin. Therefore, discussions ensue. Goal for us. It was very difficult to hold as it was deflected by RoboCin’s defender. The game continues. Kick-off for RoboCin.
1:30 – Immediate intense battle. Unfortunately, the ball is out. Ball placement by RoboCin. Nice chip over our robot, but the ball quickly goes out again. RoboCin is discussing again. The game resumes. Now the referee has to manually place the ball. RoboCin chips the ball out again. We are stuck in the opponent’s goal. Of course, this is a yellow card and a foul for us. Dangerous shot by RoboCin but saved. We place the ball, and RoboCin is discussing again. We don’t know why. They take a timeout.
1:00 – Ball placement for RoboCin, but their robot seems to have problems with it, and we get to try. Kick-off. Immediately the ball is back on the opponent’s side. Strong defense by number 5.
0:30 – Intense play on the opponent’s side. Only a few seconds left on the clock. Robot crash during ball placement. The ball is out, and the game is over.
It’s great to see that after the drought in the last RoboCup, we can finally win games again.
Today marks the first day of this year’s RoboCup in Eindhoven. For us, this day is mainly characterized by the Technical Challenges in the morning and a match in the afternoon. Our other group stage matches will take place tomorrow. For regular updates, check out our Instagram page.
Technical Challenge 8:30 AM: ER-Force vs. luhbots
Technical Challenge 12:00 PM: ER-Force vs. ZJUnlict
Group Match 3:00 PM: ER-Force vs. RoboCIN
The matches of the day are available as a livestream. A novelty this year is that both Division A and B games will be broadcast. Our matches take place on the Division A field. Our Technical Challenges are expected to be shown on the Division B stream.
Division A: Stream by Robo Team Twente
Division B: Stream by Thunderbots

The last setup day has arrived. To prepare our sleep schedule for the upcoming days, we headed to the hall at 7:30 AM today. Despite many tired faces, the focus was immediately there. It had to be, as our Technical Challenge “Black and White” starts at 8 PM, where the efficient changing of shell colors is tested. This challenge was introduced to make the different teams more recognizable to the audience.
LEAGUE TEST MATCH:
Yesterday, for the first time, we were able to conduct a test match against ourselves to identify many errors. Today, it was the TIGERs’ turn. Unlike us, they played a test match against RobôCIn to demonstrate the game flow to the entire league.

RADIO ISSUES:

Meanwhile, a third of the strategy team is working on fixing radio issues. If you fear that this RoboCup might face a similar downfall as the last one, let me reassure you. The radio now works well for 8 robots, which is sufficient for the group phase, as teams can play with 8 robots if they wish. However, this won’t work in the knockout phase, where each team can field 11 robots if they are able. Testing the solution is proving to be a persistent problem due to random parameters and outcomes. However, we remain confident that we will solve this in time.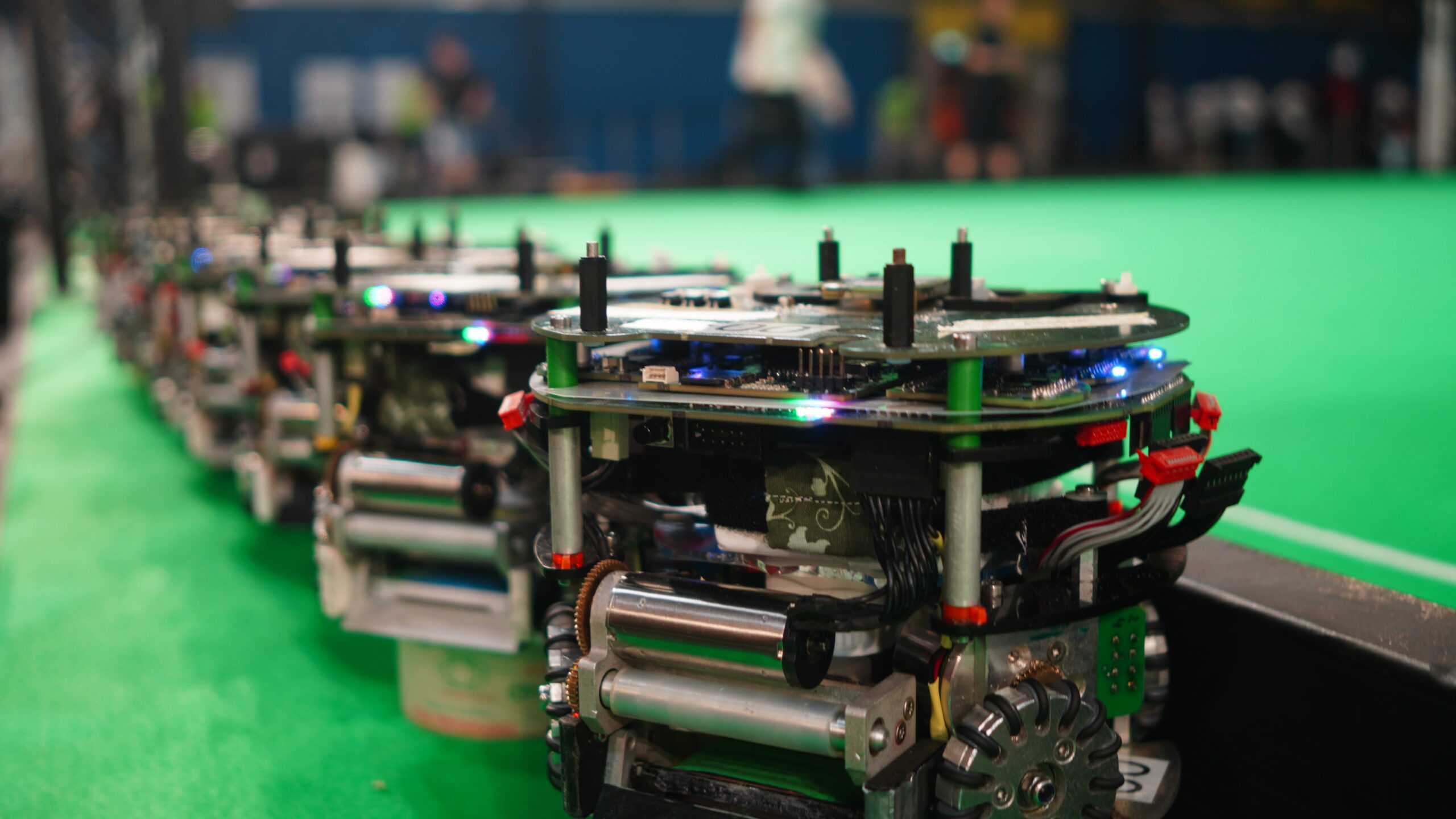
ROBOT MANUFACTURING:
Not only the strategy but also the mechanics team is working at full speed. They are continuously manufacturing parts to have more robots in stock (and hopefully on the field). Special attention is being paid to the wheels to ensure they run more smoothly than before. However, a robot is not only made up of parts but also of firmware, which runs on the robot. Since there are still heat issues, the only solution is to keep at it, test, and not lose hope. Ultimately, errors, substitutions, and sources of damage should be minimized as much as possible.