Our multi-day workshop is just around the corner and promises not only significant progress in a short amount of time but also plenty of team spirit! In addition to the intensive work on our projects, there will be joint cooking and dining to encourage exchange, as well as a relaxed game night for a bit of variety.
Before we kick off our workshop at the end of this week, here is a quick update on our current progress.
Electronics Subteam
New Funkmaster
Do you remember the MCon that we sawed apart at RoboCup? To restore the lost functionality, new ones have been ordered! We had some difficulties with the radio transceiver and its firmware, which is why we also ordered new devices. This not only solves the firmware issues but also eliminates the need to use two radio transceivers at the same time.
Another innovation: We can now measure location-dependent inductance, which significantly improves the movement of our pistons. We detailed this in this year’s ETDP. Additionally, our robots have been repaired and are now ready for the upcoming tournaments – set to get back into action!
Firmware Subteam
Firmware has 25 new radio modules from HBC, which will be picked up next week – this will greatly improve our communication. Data logging on the robot is now much faster, but the SD cards could still be a bottleneck. We made significant progress in dribbling: the new dribbler passed the tests successfully and runs very smoothly.
The absolute highlight is our new radio protocol, which we developed together with the software team. It will be a real breakthrough: precise position data, Kalman filter directly in the robot, and tracking that is more accurate than ever before. Instead of vague error messages, it now provides exact information like position, speed, and even ball control in real-time.
The data rate from HBC has already been increased, and the first parts of the protocol have been implemented – although not everything has been tested yet.
Mechanics Subteam
The mechanics team has arranged small gifts for our sponsors – a nice gesture of appreciation.
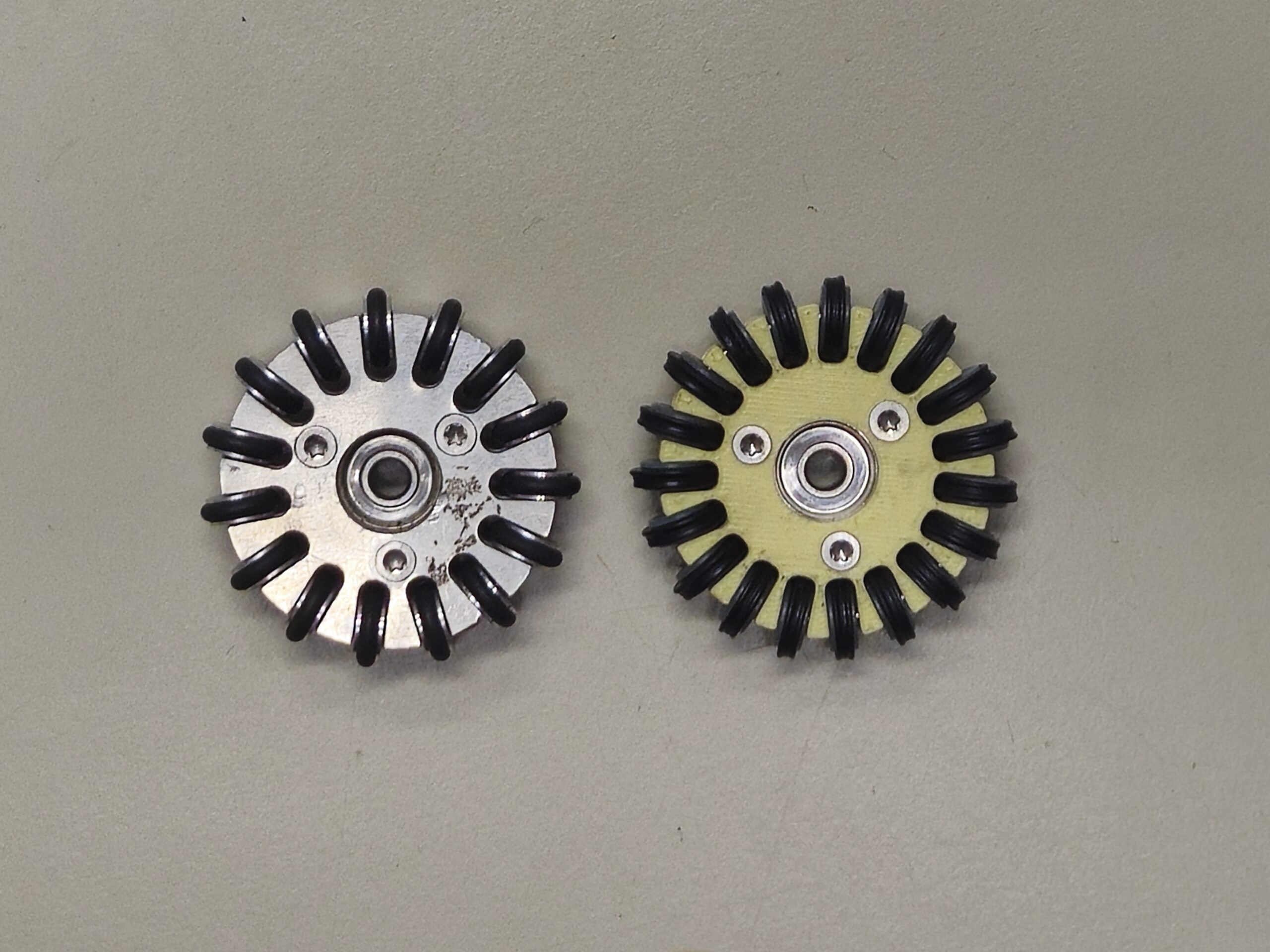
left: old dribbler, right: new dribbler
In addition, the coil measurement setup has been further improved, and a new version of the battery holder has been installed. The team is also working on finding more cost-effective manufacturing options for Omniwheels and selecting suitable bearings for the subwheels.
Another highlight: A dribbler prototype has been assembled – an exciting step forward!
Software Subteam
A software team member has written a paper in which a model for the kicker was developed to enable simulations and increase the kicker’s efficiency. Additionally, a new move was implemented that performs robot measurements and checks the driving accuracy of the robots using the field lines.
Besides the radio protocol, which was developed together with firmware, there were also a few experiments with machine learning, and a move was worked on that should enable the robot to dribble backward around opponents. Internally, the software was also revised to make everything even better and more efficient.