Wir haben es geschafft und stehen im Finale des Robocup 2019 in Sydney.
Wir haben es geschafft und stehen im Finale des Robocup 2019 in Sydney.
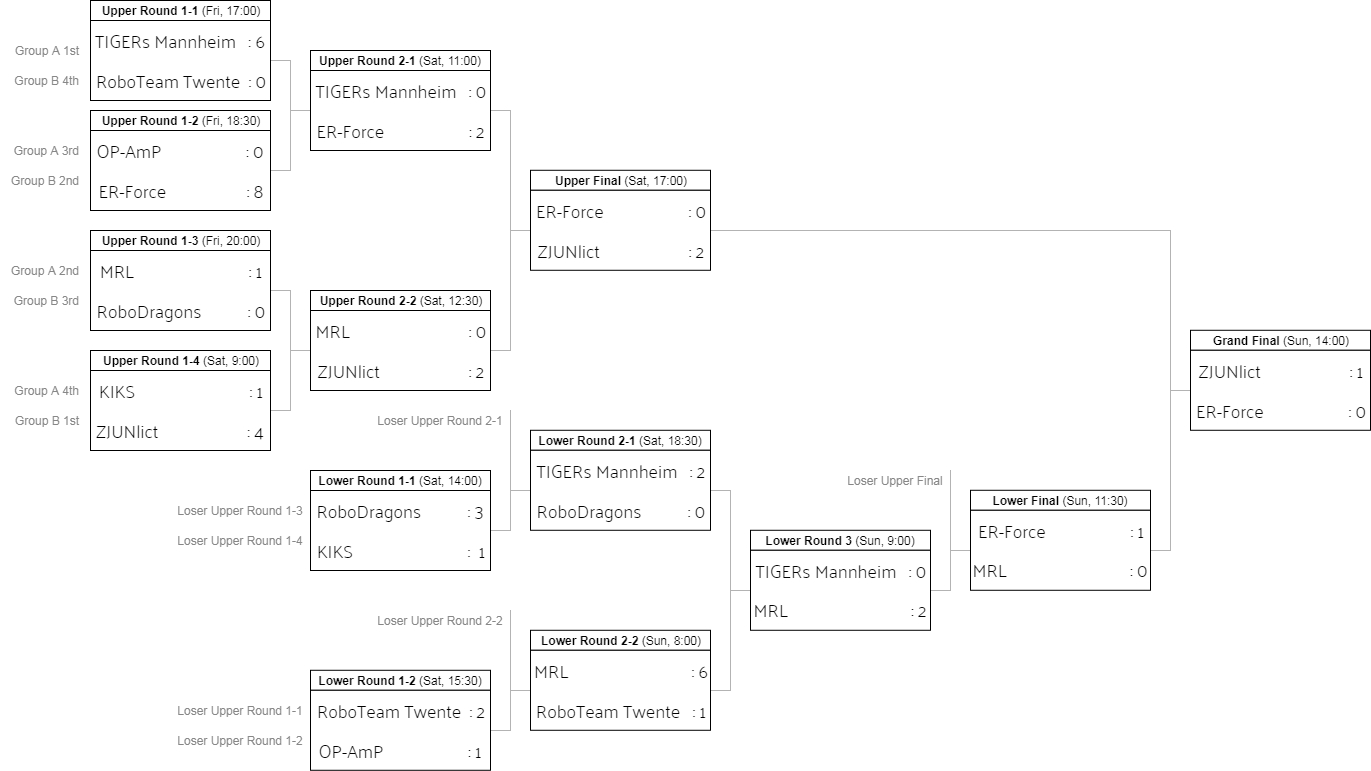
Das Spiel findet um 14 Uhr (6 Uhr deutscher Zeit ) gegen den letztjährigen Weltmeister ZJUNlict aus China statt. Das ist nun das dritte Match gegen dieses Team in diesem Turnier.
1′: Kickoff für ZJUNlict schnelles flüssiges Spiel. Unsere Roboter machen ein sehr gutes Manmarking.
2′: Immer noch flüssiges Spiel, kaum Bälle ins Aus. Außerdem gibt es meist ein sehr flüssiges Ballplacement, sodass dadurch nicht viel Zeit für Spielunterbrechungen verloren geht.
3′: Wir nehmen sicherheitshalber einen Roboter raus, eventuell geht an diesem die Lichtschranke nicht. Der automatische Schiedsrichter meldet, dass einer unserer Roboter in den gegnerischen Strafraum gefahren sein soll, offensichtlich richtig. Wieder meldet der Autoref viele Fouls auf unserer Seite, kann das sein? Diskussionen mit dem Schiedsrichter, unsere Roboter konnten dem gegnerischen Placement nicht richtig ausweichen, einer unserer Roboter muss von Platz. Sehr gefährlicher Torschuss von ZJUNlict unser Keeper hält aber perfekt. Auch ZJUNlict verursacht Botkollisionen, 7 gegen 7 erlaubte Roboter.
4′. Gefährliches Dribbeln von ZJUNlict nah an unserem Strafraum, aber unsere Verteidigung kann klären. Weiter ein sehr flüssiges Spiel. Timeout für ZJUNlict, anscheinend Nachbesserungen an den Robotern und der Software. Langer Schuss aufs Tor von ZJUNlict, leider konnte dieser gehalten werden und geht ins Aus. Wir schaffen das Ballplacement und haben den Freistoß.
5′: Jetzt mal Duelle am Strafraum des Gegners, wir pressen deutlich besser als letztes Mal gegen ZJUNlict. Rückpass auf unseren Torwart, der den Ball perfekt nach vorne spielt. Irgendwie schaffen wir es dieses Mal nicht richtig dem gegnerischen Ballplacement auszuweichen. Kurz vor der Halbzeit noch ein sehr gefährlicher Torschuss auf unser Tor, aber unser Keeper liefert eine Glanzparade.
Halbzeitpause: der Akkutausch funktioniert mit dem neuen Muster sehr gut. Auch ZJUNlict checkt noch ein letztes Mal die Akkus und die Roboter. Seitenwechsel nach der Halbzeitpause.
6′: Anstoß für uns. Der Schuss klappt aber nicht richtig. ZJUNlict schafft es nun erstaunlich gut uns dabei zu blocken sie zu blocken. Gefährlicher Torschuss von uns, aber gehalten. Der Ball rollt in eine fürs automatische Placement unmögliche Positon. Deshalb manuelles Placement durch den Schiedsrichter.
7′: Viele starke Schüsse und Duelle auf beiden Seiten. Gefährlicher Torschuss, aber gehalten. Wieder viele Zweikämpfe an unserem Strafraum. Diesmal schafft es ZJUNlict leider das Runde ins Eckige zu bringen. 0:1 Anstoß für uns. Und wieder hat unsere Hardware beim Anstoß Probleme und der Ball kullert gemütlich vor den Gegener.
8′: Stark verbessertes Duellverhalten unserer Strategie. Ball im Aus, direkter Anstoß für uns. Wieder ist ZJUNlict am Schuss. Gezielter Schuss auf unser Tor aber gehalten.
9′: Immer noch ein flüssiges Spiel, dass kaum Schiedsrichterentscheidungen benötigt, die Zeit vergeht wie im Flug. Ecke für ZJUNlict, aber nicht direkt verwandelt. Weitere Ecke.
10′: Noch weniger als eine Minute bis zum Schluss, wieder verkeilt sich der Ball beim Placement in der Ecke. Doch was ist jetzt los, kurz vor Schluss fordern wir einen Timeout? Unsere Strategie stellt auf sehr aggressives Spiel um. Kaum mehr Verteidiger, nur Roboter in der gegnerischen Hälfte und konsequentes Pressen. Pfostenschuss von ZJUNlict. Das war knapp.
Leider verlieren wir dieses grandiose Spiel mit 0:1
Wir sind damit Vizeweltmeister im Roboterfußball der SSL.

 Bevor sich unsere Wege in Australien nun trennen und wir den Kontinent noch etwas auf eigene Faust erkunden, wurden wir noch vom Goethe-Institut in Sydney eingeladen.
Bevor sich unsere Wege in Australien nun trennen und wir den Kontinent noch etwas auf eigene Faust erkunden, wurden wir noch vom Goethe-Institut in Sydney eingeladen.