
Zusammenfassung
In der Small Size League (SSL) baut jedes Team autonome zylindrische Roboter, die mit einem orangefarbenen Golfball Fußball spielen. Während des Spiels versuchen acht Roboter aus jedem Team, mit schnellen Passmanövern und intensiven Zweikampfstrategien in der vorgegebenen Spielzeit möglichst viele Tore zu erzielen.
 Hierbei ist das Robotersystem völlig autonom, was bedeutet, dass kein Teammitglied die Roboter in irgendeiner Weise während des Spiels steuern darf. Stattdessen empfängt ein zentraler PC (wir verwenden hierfür einen einfachen Laptop) vorverarbeitete Kameradaten, berechnet sich daraus die besten Spielzüge für die einzelnen Roboter und sendet diese per Funk wieder zurück zum Roboter.
Hierbei ist das Robotersystem völlig autonom, was bedeutet, dass kein Teammitglied die Roboter in irgendeiner Weise während des Spiels steuern darf. Stattdessen empfängt ein zentraler PC (wir verwenden hierfür einen einfachen Laptop) vorverarbeitete Kameradaten, berechnet sich daraus die besten Spielzüge für die einzelnen Roboter und sendet diese per Funk wieder zurück zum Roboter.
Das Spielfeld
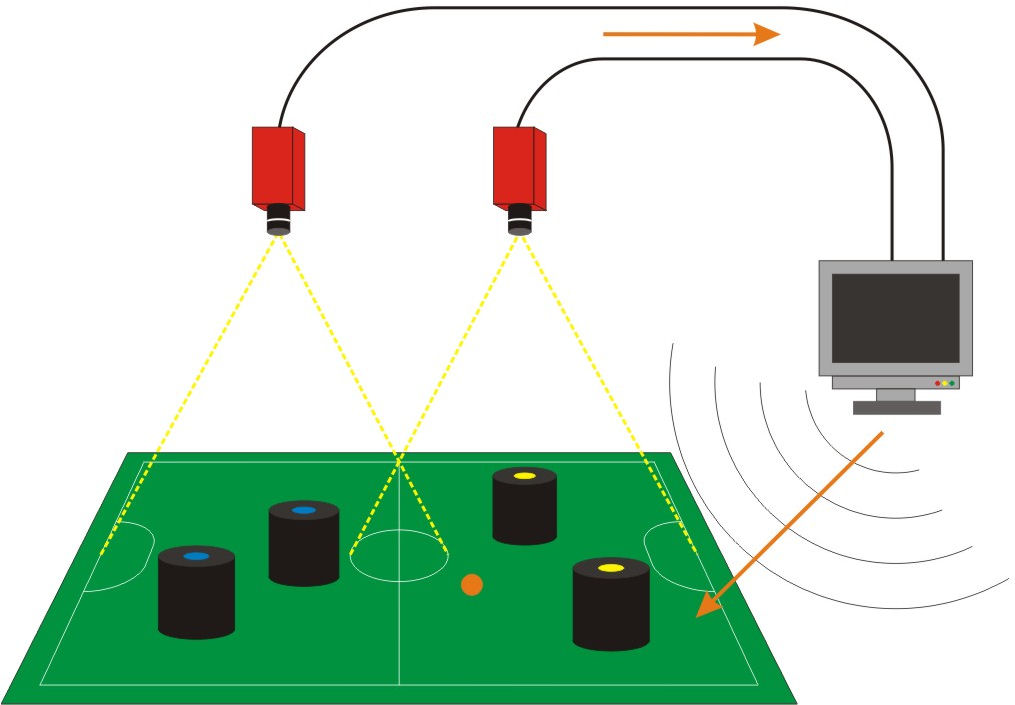
 Das Spielfeld hat derzeit eine Größe von 9 m x 12 m und ist mit einem Teppich ausgelegt. Alle 22 Roboter werden von 2 über dem Spielfeld positionierten USB-Kameras beobachtet. Diese sind mit einem zentralisierten Vision-Computer verbunden.
Das Spielfeld hat derzeit eine Größe von 9 m x 12 m und ist mit einem Teppich ausgelegt. Alle 22 Roboter werden von 2 über dem Spielfeld positionierten USB-Kameras beobachtet. Diese sind mit einem zentralisierten Vision-Computer verbunden.
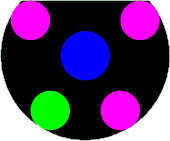
Da die Deckplatte jedes Roboters mit einem standardisierten Muster ausgestattet ist (dem sogenannten ”Butterfly-Pattern“, welches aus buntem Papier besteht), kann seine Trikotnummer und die Team-Zugehörigkeit eindeutig festgestellt werden.
Hierbei steht die Farbe in der Mitte für die Team-Zugehörigkeit (blaues vs. gelbes Team) und das Schmetterlingsmuster rundherum für die Trikotnummer. Außerdem sind die vorderen beiden Punkte weiter auseinander als die hinteren, wodurch die Kamera auch die Orientierung des Roboters feststellen kann.
Die Roboter
Die Größe der Roboter ist durch das Regelwerk auf einen Durchmesser von 18 cm und eine Höhe von 15 cm begrenzt. Aus diesem Grund sehen die Roboter der Teams in der Regel äußerlich sehr ähnlich aus. Im Gegensatz dazu kann die mechanische und elektrische Konstruktion sehr unterschiedlich sein. Die Erfahrungen aus der Vergangenheit zeigen allerdings, dass die meisten Systeme mit vier Kugelrädern und elektromagnetischen Kicker-Vorrichtungen für Linear- und Chipkicks gebaut werden.
Der Schiedsrichter
Zurzeit ist ein menschlicher Schiedsrichter für alle Entscheidungen verantwortlich. Da das Spielfeld mit seinen 9 m x 12 m allerdings sehr groß ist, bekommt er Unterstützung von einem zweiten Schiedsrichter. Die Entscheidungen der Schiedsrichter werden über die sogenannte RefBox in einen zentralen Computer eingespeist, welcher diese dann über eine Netzwerkverbindung an die Team-Rechner weiterleitet. In dem Bestreben, das Spiel zu automatisieren, wurden noch mehr autonome Schiedsrichtersysteme, so genannte Autorefs, entwickelt, die in der Liga weiter eingesetzt werden sollen.
Die Teams
Die beiden gegnerischen Teams erhalten alle Informationen von den Systemen RefBox und Vision über ein lokales Netzwerk. Von diesem Zeitpunkt an liegt es in der alleinigen Verantwortung der Teams, die Eingaben zu verarbeiten. In der Regel werden die Kameradaten weiterverarbeitet und die geometrische Platzierung von Robotern und Ball auf dem Spielfeld erkannt. Die KI des Teams entscheidet sich dann für eine Strategie und sendet ihre aktuellen Entscheidungen an die Roboter. Dies geschieht etwa 60 Mal pro Sekunde, um reibungslose Bewegungen zu gewährleisten. Während des Spiels darf kein Teammitglied den Computer, der die Strategie ausführt, berühren. Nur bei Auszeiten und in der Halbzeitpause können Änderungen vorgenommen werden. Ein Teammitglied darf mit dem Schiedsrichter kommunizieren und die Roboter auf dem Spielfeld austauschen.